



Panimula sa Application ng PEEK sa Robot Structural Components (Enclosures, Frameworks)
Sa panahon ng proseso ng pananaliksik at pagmamanupaktura ng mga robot, nagsisilbing pangunahing suporta ang mga bahagi ng istruktura, na gumaganap ng mahalagang papel sa pagganap, katatagan, at pagpapalawak ng mga sitwasyon ng aplikasyon ng mga robot. Ang PEEK na materyal, kasama ang mga natatanging katangian nito, ay nagpapakita ng walang kapantay na mga pakinabang sa larangan ng robot enclosures at frameworks, na unti-unting nagiging isang pangunahing puwersang nagtutulak para sa pagbabago sa industriya.
I. Pagsusuri ng PEEK Material Characteristics
Mataas na lakas at mataas na tigas: Ang PEEK ay nagtataglay ng mahusay na mga mekanikal na katangian, na may tensile strength at bending modulus nito na maihahambing sa ilang mga metal na materyales, na nagbibigay ng maaasahang suporta sa istruktura para sa mga enclosure at framework ng robot, tinitiyak na ang robot ay nagpapanatili ng isang matatag na anyo sa kumplikadong mga kondisyon sa pagtatrabaho, lumalaban sa mga panlabas na epekto at stress, at ginagarantiyahan ang ligtas na operasyon ng mga panloob na bahagi ng katumpakan.
Magaang bentahe: Ang density ng PEEK ay humigit-kumulang 1.3 - 1.4g/cm³, halos kalahati lang ng aluminyo (humigit-kumulang 2.7g/cm³). Ang magaan na feature na ito ay mahalaga para sa mga robot, na nagbibigay-daan sa paggamit ng PEEK na gumawa ng mga enclosure at frameworks na may parehong mga kinakailangan sa lakas, na makabuluhang binabawasan ang sariling timbang ng robot. Isinasaalang-alang ang mga humanoid robot bilang halimbawa, ang pinababang timbang ay nakakatulong na pahusayin ang kanilang flexibility sa paggalaw, bilis ng pagtugon, at pagkonsumo ng enerhiya, pagpapahaba ng kanilang buhay ng baterya, at pagpapagana sa kanila na gumanap nang mas mahusay sa mga sitwasyong nangangailangan ng mataas na tibay at kadaliang kumilos, tulad ng mga operasyon ng serbisyo at pagsagip.
Resistensiya sa kaagnasan ng kemikal: Sa iba't ibang industriya, gaya ng pang-industriya, medikal, at pagpoproseso ng pagkain, kadalasang nakakaharap ang mga robot ng iba't ibang kemikal na sangkap. Ang PEEK na materyal ay may malakas na resistensya sa mga solusyon sa acid at alkali, mga organikong solvent, atbp., na epektibong pinipigilan ang mga enclosure at frameworks na masira ng kemikal na kaagnasan, makabuluhang pinahaba ang buhay ng serbisyo ng robot at tinitiyak ang matatag na operasyon sa malupit na kapaligiran ng kemikal. Halimbawa, sa mga workshop sa paggawa ng kemikal, ang mga robot na may mga bahagi ng istruktura ng PEEK ay maaaring makatiis sa mga corrosive na epekto ng mga gas at likido sa loob ng mahabang panahon.
Magandang thermal stability: Maaaring mapanatili ng PEEK ang stable na performance sa mga high-temperature na kapaligiran, na may glass transition temperature nito na humigit-kumulang 143℃, at pangmatagalang temperatura ng paggamit na humigit-kumulang 240℃, at kahit na makatiis ng mas mataas na temperatura sa maikling panahon. Ang katangiang ito ay nagbibigay-daan sa mga robot na umangkop sa mga sitwasyon sa pagpapatakbo na may mataas na temperatura, tulad ng mga automotive welding workshop at high-temperature na paghawak ng materyal, pag-iwas sa structural deformation dahil sa mga pagbabago sa temperatura at nakakaapekto sa katumpakan at pagiging maaasahan ng robot.
II. Mga Halimbawa ng Application at Mga Bentahe ng PEEK sa Robot Enclosures
Pinahusay na proteksyon at tibay: Ang kapaligiran sa pagtatrabaho ng mga robot na pang-industriya ay madalas na malupit, na may mga banggaan, alitan, at alikabok, langis, at iba pang mga contaminant. Ang paggamit ng PEEK na materyal sa paggawa ng mga enclosure, na may mataas na lakas at wear resistance, ay maaaring epektibong labanan ang mga panlabas na banggaan at gasgas, bawasan ang pagkasira ng enclosure, at maiwasan ang alikabok, langis, at iba pang mga sangkap mula sa pagdikit at pagguho, pagprotekta sa mga panloob na elektronikong bahagi at mekanikal na istruktura, pagbabawas ng posibilidad ng mga pagkakamali, at pagpapabuti ng pangkalahatang tibay ng robot.
Nadagdagang flexibility ng disenyo: Ang PEEK na materyal ay madaling iproseso at hulmahin, sa pamamagitan ng injection molding, compression molding, atbp., maaari itong gawin sa kumplikadong hugis at magkakaibang mga enclosure. Nagbibigay ito ng malawak na espasyo para sa disenyo ng mga robot, hindi lamang nakakatugon sa mga personalized na pangangailangan ng iba't ibang industriya para sa hitsura ng robot, kundi pati na rin ang pag-optimize ng aerodynamic na pagganap ng mga enclosure habang tinitiyak ang lakas ng istruktura, binabawasan ang resistensya ng hangin, at pinapabuti ang kahusayan ng robot sa panahon ng paggalaw. Halimbawa, ang ilang mga robot ng serbisyo ay gumagamit ng mga naka-streamline na mga enclosure ng PEEK, na parehong kaaya-aya at maaaring mabawasan ang ingay sa pagpapatakbo.
Pagbabawas ng gastos: Bagama't medyo mataas ang paunang halaga ng materyal ng PEEK, mula sa isang pangmatagalang pananaw sa paggamit at pagpapanatili, ang natitirang pagganap nito ay maaaring makabuluhang bawasan ang bilang ng mga pag-aayos ng robot at mga frequency ng pagpapalit, at babaan ang kabuuang gastos sa paggamit. Samantala, ang PEEK na materyal ay may mataas na rate ng paggamit ng materyal sa panahon ng pagpoproseso, at maaari itong isama sa pamamagitan ng na-optimize na disenyo upang mabawasan ang bilang ng mga bahagi at proseso ng pagpupulong, na higit pang makatipid sa mga gastos sa produksyon.
III. Mga Resulta at Halaga ng Application sa Robot Frameworks
Pag-optimize ng Pagganap ng Suporta: Bilang pangunahing bahagi para sa tindig, ang balangkas ng robot ay kailangang magkaroon ng sapat na lakas at tigas upang suportahan ang iba't ibang bahagi at maglipat ng kapangyarihan. Tinitiyak ng mataas na lakas at katigasan ng PEEK na materyal na matatagalan ng framework ang bigat ng robot at epektibong lumalaban sa pag-twist at pagpapapangit sa panahon ng paggalaw, na ginagarantiyahan ang katumpakan at katatagan ng magkasanib na paggalaw ng robot. Ang pagkuha ng mga multi-joint na pang-industriyang robot bilang isang halimbawa, ang PEEK framework ay maaaring magbigay-daan sa robot na mapanatili ang mahusay na kontrol sa postura sa panahon ng high-speed na operasyon at high-precision na operasyon.
Pagsasakatuparan ng Magaan at Mahusay na Paggalaw: Ang magaan na balangkas ng PEEK ay maaaring makabuluhang bawasan ang inertia ng robot, na ginagawa itong mas maliksi sa panahon ng pagsisimula, paghinto, at pag-ikot, at pagkakaroon ng mas mabilis na bilis ng pagtugon. Ito ay partikular na mahalaga para sa mga robot na kailangang magsagawa ng mabilis na mga aksyon nang madalas, tulad ng pag-uuri ng mga robot at logistik na humahawak ng mga robot, na maaaring makabuluhang tumaas ang kahusayan sa trabaho habang binabawasan ang pagkonsumo ng enerhiya at pagpapababa ng mga gastos sa pagpapatakbo.
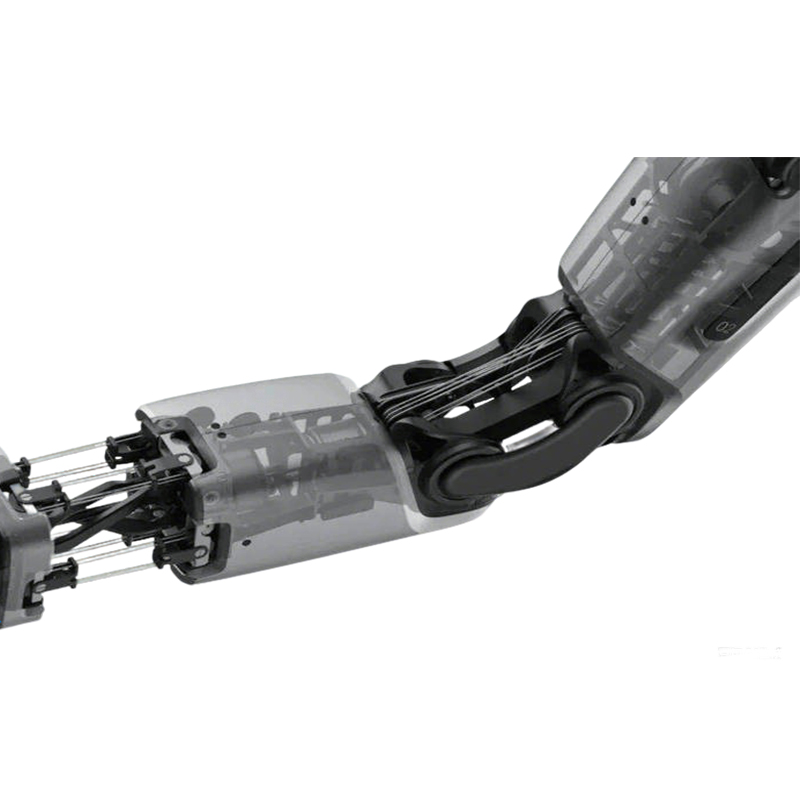
Adaptation sa Complex Joint Structures: Sa pag-unlad ng robot technology, ang magkasanib na istruktura ay nagiging kumplikado, at ang mas mataas na mga kinakailangan sa adaptability ay ipinapataw sa mga materyales. Ang mahusay na pagganap ng pagpoproseso ng PEEK na materyal ay nagbibigay-daan sa paggawa ng mga bahagi ng balangkas na perpektong akma sa kumplikadong magkasanib na istruktura, na tinitiyak ang kinis at flexibility ng magkasanib na paggalaw. Halimbawa, sa limbs framework ng humanoid robot, ang PEEK na materyal ay maaaring i-customize at iproseso ayon sa mga katangian ng paggalaw ng mga joints, na nakakamit ng mas natural at nababaluktot na imitasyon ng mga paggalaw.











